Humanoid robots are crossing the gap from lab demos to real warehouses, kitchens, and factory floors — but most teams discover the hard part isn’t the model. It’s the data behind it. Foundation models can recognize a cup; deploying a humanoid that picks one up, hands it to an elderly person, and adapts when the person reaches differently is a different problem entirely. Humanoid robot training data is the deciding factor between a polished demo and a system that survives contact with the real world.
This guide walks through what humanoid AI teams need across data types, annotation depth, safety coverage, and quality controls before they push a model into production.
Key Takeaways
- Humanoid deployment requires action-aligned multimodal data, not just labeled images.
- Foundation models still need real-world demonstrations to handle physical variability.
- Bimanual, contact-rich tasks demand precise trajectory and force annotations.
- Safety-scenario coverage is now a deployment gating criterion across the industry.
- Human-in-the-loop review and inter-annotator agreement remain essential quality controls.
- VLA-ready output formats reduce friction between data ops and training pipelines.
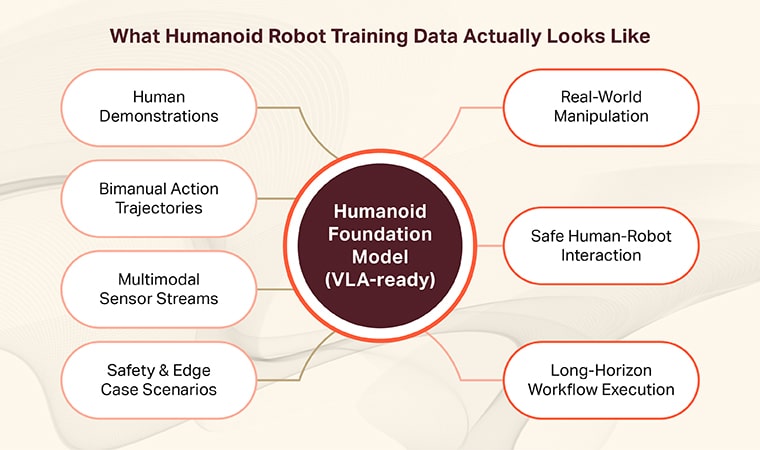
What does humanoid robot training data look like?
 Humanoid robot training data is multimodal, time-synchronized data that captures both what the robot perceives and what a human (or robot) does in response. A useful dataset combines synchronized RGB and depth video, audio, IMU and force readings, joint states, and language instructions, paired with labeled action trajectories.
Humanoid robot training data is multimodal, time-synchronized data that captures both what the robot perceives and what a human (or robot) does in response. A useful dataset combines synchronized RGB and depth video, audio, IMU and force readings, joint states, and language instructions, paired with labeled action trajectories.
Action trajectory: A time-stamped sequence of end-effector poses, joint angles, or motor commands that describes how a task is performed.
The Open X-Embodiment collaboration unified data across 22 robot embodiments and more than 500 tasks (DeepMind/Stanford et al., 2024), illustrating the scale modern humanoid foundation models expect at pre-training. But pre-training scale alone does not deliver deployment. Teams still need their own task-specific data layered on top — collected in environments their robots will actually operate in.
Why do humanoid teams hit a data wall before deployment?
Humanoid teams hit a data wall because web-scale image-text pairs do not contain action trajectories, contact forces, or human intent. A model can describe a cluttered shelf perfectly and still fail to grasp from it. The gap between understanding a scene and acting in it is filled with structured demonstrations, telemetry, and edge-case coverage that no public dataset provides.
Picture a mid-size humanoid startup whose pick-and-place demo runs cleanly in a controlled studio. When the same robot enters a real warehouse with reflective floors, partial occlusions, and unfamiliar packaging, the success rate collapses — not because the model is wrong, but because no one trained it on those conditions. Closing that gap is a data problem, not a model problem.
What data types matter most for bimanual manipulation?
 Bimanual manipulation demands data that captures coordination between hands, contact dynamics, and recovery behaviors — not just end positions.
Bimanual manipulation demands data that captures coordination between hands, contact dynamics, and recovery behaviors — not just end positions.
Bimanual manipulation: A robotic skill class that uses two arms and hands together to handle objects that single-arm policies cannot manage reliably.
The non-negotiable layers include:
- Human or teleoperated demonstrations with both hands tracked at high frame rates.
- Synchronized force and tactile readings across grippers and contact points.
- Object-state annotations marking position, orientation, and deformation across each frame.
- Failure recovery sequences showing what humans do when an object slips or shifts.
- Instruction–action pairings connecting natural-language goals to executed motion.
Shaip’s Physical AI workflows capture this layer through global studio capture and field collection across kitchens, warehouses, factories, and homes, with annotation depth tuned for VLA (vision-language-action) model training. See Shaip’s Physical AI offering for the full pipeline.
How should you structure human demonstration data for VLA training?
Human demonstration data should be structured as discrete, language-labeled episodes — each episode containing aligned observations, instructions, action trajectories, and a success or failure label.
A recent large-scale effort transformed unstructured egocentric human videos into VLA-formatted training data of 1 million episodes across 26 million frames (Wu et al., arXiv, 2025), confirming that demonstration data is most useful when it is segmented, atomic, and language-aligned. Loose, unsegmented video alone does not train a deployable policy.
Useful demonstrations carry: A clear task instruction, framewise observations, action labels at every step, timestamps, and an evaluation marker. Shaip’s data annotation workflows deliver exactly this structure, including provenance metadata for enterprise legal review.
How do safety scenarios change the data pipeline?
Safety scenarios change the data pipeline by forcing teams to plan rare-event coverage before collection begins, not after. Edge cases — occlusions, low light, unexpected human approach, dropped objects — are the situations where deployment risk concentrates.
Edge case: A rare but plausible operating condition that disproportionately drives field failures and safety incidents.
Robust pipelines bake in:
- Scripted scenario lists tied to deployment risk tiers
- Regression test sets that catch performance drift
- Inter-annotator agreement thresholds for high-risk labels
- Release-readiness benchmarks across rare events
The U.S. National Institute of Standards and Technology’s AI Risk Management Framework provides a useful neutral reference for organizing risk-tiered evaluation, especially for teams operating across regulated environments.