A robot that picks the wrong box, freezes in front of a person, or drops a fragile part rarely fails because of bad code. It fails because something it was taught to recognize wasn’t labeled correctly — or wasn’t labeled at all. Robotics data annotation is what stands between raw sensor streams and a robot that behaves predictably in the real world. Think of it as teaching a robot five separate vocabularies of the physical world — objects, actions, intent, motion, and failure modes — and the model only becomes fluent when all five are taught well. This playbook walks through exactly how to annotate each dimension and how to sequence the work end to end.
Key Takeaways
- Robotics data annotation labels multimodal sensor streams so robots can perceive and act safely.
- The five dimensions are objects, actions, intent, motion, and failure modes.
- Sensor fusion requires synchronizing RGB, LiDAR, and IMU streams before labeling.
- Action and motion annotation differ — actions are discrete; motion is continuous.
- Failure-mode labeling captures edge cases that drive most real-world robot mistakes.
- A six-step HITL workflow keeps multimodal annotation consistent at scale.
Why is robotics data annotation different from other AI training data?
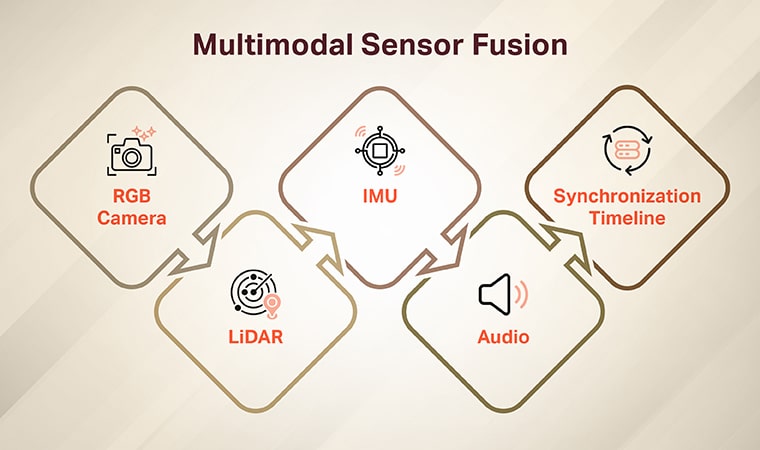
Robotics data annotation is harder than typical computer vision labeling because robots consume multimodal, time-aligned, safety-critical data. A single second of robot perception can include RGB frames, LiDAR point clouds, IMU motion readings, and audio — each captured at different rates and resolutions. Unlike static image labeling, every annotation must hold up across sensors, across frames, and across the physical consequences of acting on it. Global industrial robot installations reached 542,076 units in 2024 (IFR World Robotics, 2025), and that scale means even small labeling errors compound across millions of frames. Shaip’s robotics data annotation pipelines align RGB, LiDAR, and IMU streams to a single timeline before labeling begins, reducing cross-modal drift downstream.
What are the 5 types of robotics data annotation every AI team needs?
The five types of robotics data annotation are objects, actions, intent, motion, and failure modes. Each dimension answers a different question the robot needs to learn: what is it, what is happening, why is it happening, how is it moving, and what’s going wrong. Treating them as separate annotation tracks prevents the most common mistake — collapsing them into a single “label” field that loses signal.

Bounding box
A rectangular outline marking an object’s location in an image — fast, low-precision, ideal for detection.

Polygon and segmentation mask
Pixel-level outlines for irregular shapes like cables, fabric, or partial occlusions.

3D cuboid
A volumetric box drawn in point cloud space for items the robot must reach around or under.

Point cloud segmentation
Per-point class labels on LiDAR or depth data for surfaces, obstacles, and free space.
For multi-sensor systems doing sensor fusion, annotators should label the same object across every modality in the same frame so the model learns one consistent identity, not five drifting ones.
How do you annotate actions and motion in robot training data?
Action and motion annotation are related but distinct: actions are discrete labeled segments of behavior, while motion is the continuous trajectory underneath. Both need accurate temporal alignment, and most teams underestimate how often the two get conflated.

What is action annotation in robotics?
Action annotation breaks a continuous video or sensor stream into named segments — approach, grasp, lift, rotate, place, retract — each with a start frame and an end frame. Annotators should follow a fixed action vocabulary and a tie-breaking rule for ambiguous transitions (e.g., does lift end when the object clears the bin, or when the arm reaches its waypoint?). Consistent rules across hundreds of hours of footage are what make activity recognition models actually generalize. Tight video annotation pipelines keep these segment boundaries reproducible across teams.
What is motion annotation in robotics?
Motion annotation captures the continuous physics of how something moves — joint angles, end-effector trajectories, velocities, and accelerations. This typically combines pose estimation (keypoints on a robot arm or human body) with synchronized IMU readings, sampled at a high enough rate that fast movements aren’t smeared. The output is a time-series of poses that the model can predict, smooth, or anticipate.
How do you annotate intent for human-robot interaction?
 Intent annotation tags the purpose behind an observed behavior, not the behavior itself. A human pointing at a shelf is the action; “asking the robot to fetch the blue box” is the intent. Intent labels typically come from three sources: gesture and gaze cues, natural-language commands paired with the matching action segment, and proximity or social context (a person walking toward the robot vs. past it). For collaborative and service robots — including humanoid robots — intent annotation is the layer that powers safe handoffs, anticipation, and graceful failure. Shaip’s domain-trained annotators apply consistent intent labels across pick-and-place sequences, gesture cues, and natural-language commands so models learn purpose, not just motion.
Intent annotation tags the purpose behind an observed behavior, not the behavior itself. A human pointing at a shelf is the action; “asking the robot to fetch the blue box” is the intent. Intent labels typically come from three sources: gesture and gaze cues, natural-language commands paired with the matching action segment, and proximity or social context (a person walking toward the robot vs. past it). For collaborative and service robots — including humanoid robots — intent annotation is the layer that powers safe handoffs, anticipation, and graceful failure. Shaip’s domain-trained annotators apply consistent intent labels across pick-and-place sequences, gesture cues, and natural-language commands so models learn purpose, not just motion.
How do you annotate failure modes and edge cases in robotics datasets?
Failure-mode annotation labels what went wrong, what almost went wrong, and the conditions that produced it. This is the dimension most training sets shortchange — and the one that most predicts real-world reliability. Picture a mid-size warehouse running a pick-and-place robot: the robot performs fine on standard SKUs but drops translucent bottles twice a shift. The fix isn’t more clean data; it’s labeled examples of the failure — reflective surfaces, partial occlusion, off-center grasps, and the near-misses where the gripper slipped but recovered. Up to 80% of AI project time is spent preparing data (Cognilytica, 2024), and skipping failure modes wastes most of that effort. Quality should be tracked with concrete metrics — Intersection over Union (IoU) for object overlap, F1 for class accuracy, and edge-case coverage rates per scenario type. Frameworks like the NIST AI Risk Management Framework explicitly call out documented failure analysis as a core trustworthiness requirement. Shaip’s annotation playbooks include explicit failure-mode taxonomies — perception errors, grasp failures, navigation near-misses, sensor faults, and human-interaction violations — so models learn from edge cases, not just clean trajectories.
What is the best workflow to annotate robotics data end-to-end?
The best workflow is a six-step, repeatable pipeline that turns multimodal annotation from a one-off labeling sprint into a continuous loop. Use these steps in order:

- Define the operational goal. Specify what the robot must perceive, what should trigger action, and what counts as a critical miss versus an acceptable false alarm.
- Synchronize sensor streams. Align RGB, LiDAR, IMU, and audio to a single timeline — typically through ROS bag files or equivalent — before any labeling begins.
- Build a five-dimension schema. Create separate fields for objects, actions, intent, motion, and failure modes; never collapse them into one label.
- Pre-label with automation and synthetic data. Use foundation models for first-pass object and action labels and supplement rare scenarios with simulation-generated data.
- Run human-in-the-loop (HITL) validation. Domain-trained annotators review pre-labels, correct edge cases, and resolve ambiguous boundaries — the same RLHF-style oversight pattern used in modern LLM training.
- Track versions and feed deployment data back. Tag each dataset version, log model regressions against it, and fold field-collected failures into the next annotation cycle.
Conclusion
Strong robotics models are not built on more data — they are built on data labeled across the right dimensions. Objects tell the robot what is there, actions and motion tell it what is happening, intent tells it why, and failure modes tell it where to be careful. Teams that treat these as five distinct annotation tracks ship more reliable systems and recover faster when the real world surprises them. For teams scaling beyond pilots, partnering with experienced robotics data annotation services is often the fastest path from prototype to production. To go deeper on multimodal labeling for autonomy, see how physical AI training data shapes real-world robot performance.